|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
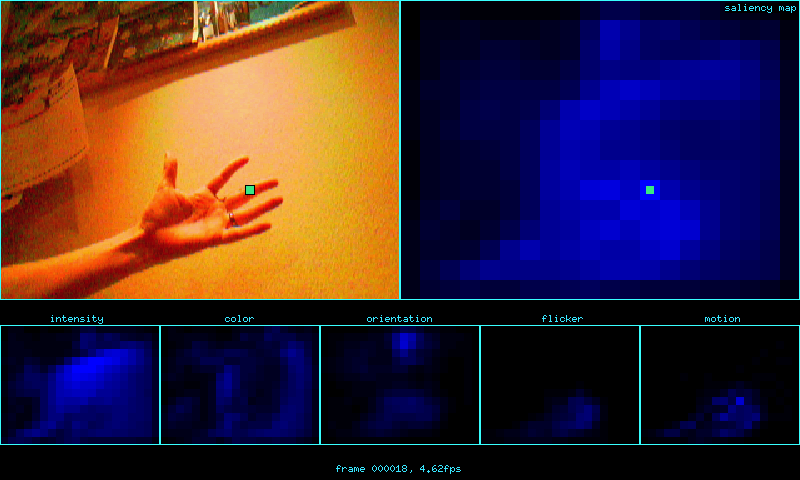
Back in 1995, we started what has become the iLab Neuromorphic Vision C++ Toolkit. The toolkit allows one to develop neuroscience-inspired computer vision models. The core elements provided by this toolkit are:
This toolkit has been used by thousands of major universities, research labs, and corporations worldwide. It is fully open-source (GPL). The toolkit is available at http://iLab.usc.edu/toolkit/
In 2010, we started the Neuromorphic Robotics Toolkit. The main goal was to facilitate the deployment of more complex models that would run on collections of computers with mixed architectures (different CPU models, various CPU+GPU combinations, etc). NRT provides a Blackboard-based message passing architecture that allows one to easily transfer any C++ data structure from one computer to another. When running multiple threads on a single machine, those transfers come at negligible cost (zero-copy of the data), and when they are between physically distinct machines on a network, the framework handles the serialization (or marshalling) of the data transparently (it makes no difference to a user whether a particular model runs on one machine or on a network of machines, except for execution speed).
At its heart, the Neuromorphic Robotics Toolkit is a C++ library and a set of tools to help you write high-performance modular software. NRT provides a framework in which developers can design lightweight, interchangeable processing modules which communicate by passing messages. NRT also provides libraries for performing various robotics related processing such as Image Processing, PointCloud Processing, etc.
NRT is a C++-14 framework.
Modular programming is a technique in which a software system is composed of self-contained, interchangeable components with defined interfaces. Because each module is self-contained, it can be tested independently from the rest of the system. Furthermore, having well-defined interfaces between modules allows researchers to effectively communicate their components' requirements and capabilities to the rest of the team.
After reviewing several existing modular programming frameworks, we determined the following set of requirements:
The Neuromorphic Robotics Toolkit is our solution to this list of requirements. Beyond these, it also provides a graphical tool for managing and creating networks of connected modules, and a suite of administration tools for starting, configuring, and stopping systems.
The core inspiration for NRT is to consider the brain as an agency of concurrent specialized knowledge sources, whereby multiple such sources work together towards solving a complex problem. This vision is not new, and has been implemented in many early artificial intelligence systems, including VISIONS (Hanson & Riseman, 1978), HEARSAY-II (Erman et al., 1980), and Copycat (Hofstadter & Mitchell, 1995).
In this computing paradigm, a common knowledge base, the blackboard, is iteratively updated:
Other groups have also explored schema-based and blackboard architectures in robotics (e.g., Arkin, 1989; Brooks, 1991; Xu & van Brussel, 1997) as well as in cognitive science (e.g., van der Velde & de Kamps, 2006). Here, with NRT we developed the necessary tools to bring these kinds of architectures to a new level of user friendliness through the use of highly modular, transparently distributed, graphical-oriented programming.
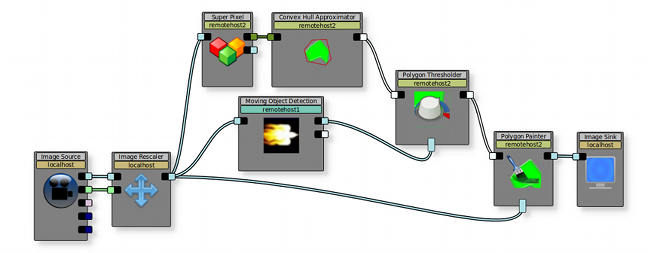
Novice users can assemble complex systems running on collections of computers by simply dragging and connecting software modules (the blackboard agents), where the modules interact via a distributed Blackboard Federation system behind the scenes (connections represent posting/subscribing of/to messages). Similar graphical programming metaphors have proven particularly effective in previous systems, including Khoros/Cantata, AVS (Advanced Visual Systems Inc.), Lego Mindstorms, Flowstone, and many others. While these previous frameworks have often been limited to single-CPU systems and simpler point-to-point information flow between modules, we have used our blackboard-based NRT framework on machines ranging from clusters with 288 CPU cores + 2048 GPU cores, to a single laptop, or even a 10-Watt netbook (Intel Atom).
A number of new features allow NRT to eliminate some of the major caveats of similar previous systems, described throughout this documentation.
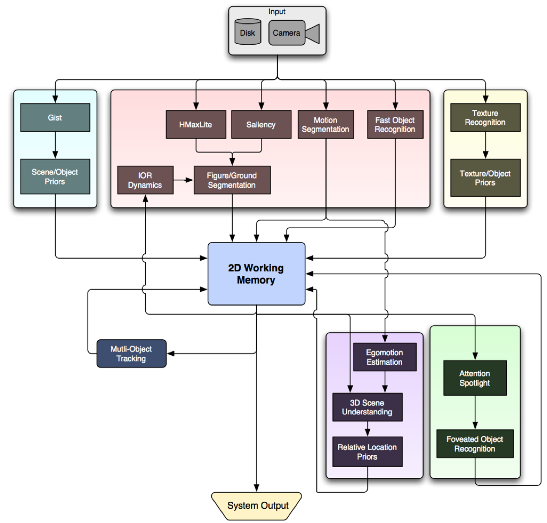
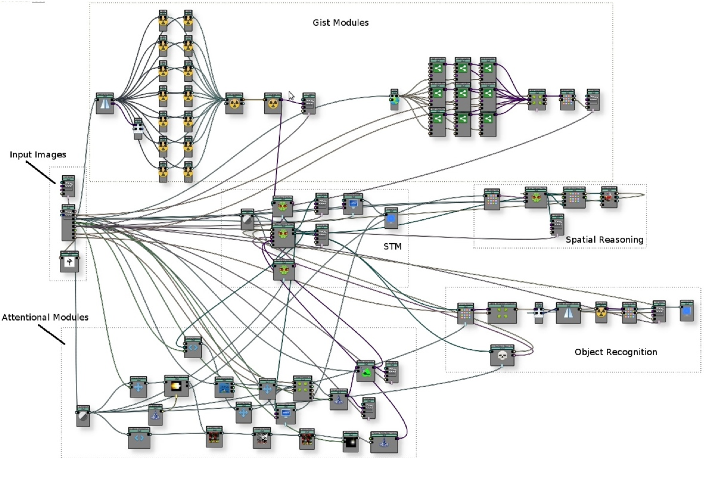
Initial development of NRT started under the DARPA Neovision2 project. NRT was developed to allow us to build a neuro-inspired machine vision system that can attend to, track, and recognize up to 10 object categories (cars, trucks, boats, people, etc) in high-definition aerial video.
NRT is still mainly for internal development in Prof Itti's lab at the University of Southern California. But it is open-source (GPL license) and will be released for public use once all features are deemed sufficiently robust. In the meantime, interested readers may want to check out the documentation at http://nrtkit.org

The JeVois framework benefits from our previous research with INVT and NRT. It is mainly geared towards embedded systems with a single processor, and towards stream-based processing (one image in form the camera, one image out to USB). Many of the innovations which we have developed for INVT and NRT have been ported to JeVois, including chiefly the ability to construct complex machine vision pipelines using re-usable components which have runtime-tunable parameters, and providing a framework to ease the development of new components and their parameters.
JeVois is a C++-17 framework.
Some features of our previous frameworks have been dropped but could be quite easily added, including a powerful Image class template (JeVois only provides a minimal RawImage class, and conversions to OpenCV's image class), blackboard architecture, and message passing including serialization.
New features specific to JeVois include kernel-level USB Gadget driver, kernel-level full-featured camera chip driver, user interface classes, and a new Engine component to orchestrate the flow of data from camera to processing to output over a USB link.
These features are presented in more details throughout this documentation. JeVois is open-source (GPL license). Development of JeVois was in part made possible through a research and outreach grant from the National Science Foundation, Expeditions in Computing program.
 1.9.8
1.9.8
