|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
#include <jevoisbase/Components/Saliency/env_motion_channel.h>#include <jevoisbase/Components/Saliency/env_c_math_ops.h>#include <jevoisbase/Components/Saliency/env_channel.h>#include <jevoisbase/Components/Saliency/env_image_ops.h>#include <jevoisbase/Components/Saliency/env_log.h>#include <jevoisbase/Components/Saliency/env_params.h>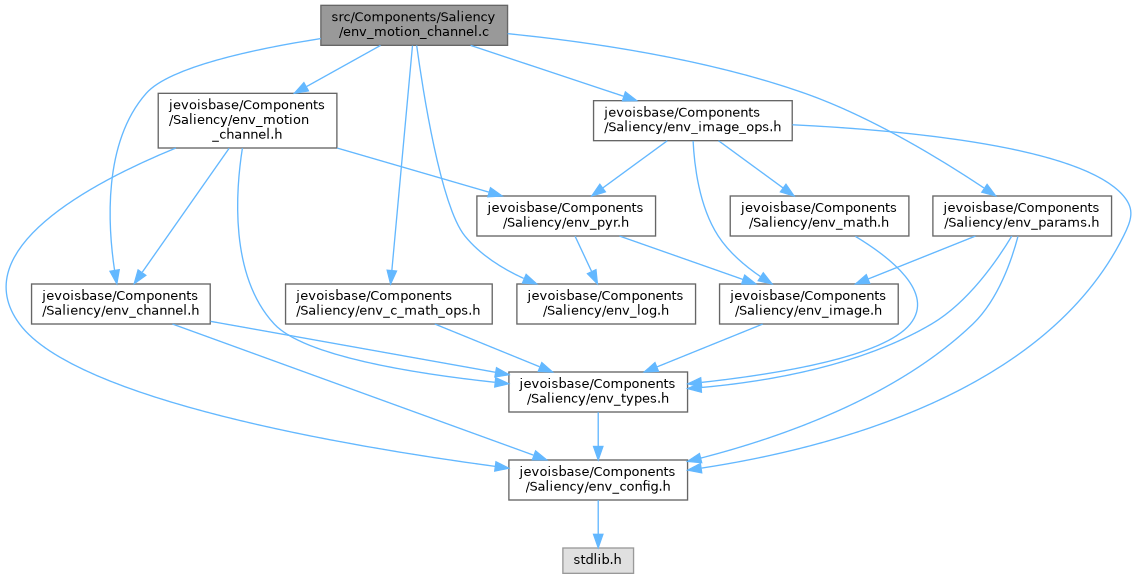
Go to the source code of this file.
Functions | |
| void | env_motion_channel_init (struct env_motion_channel *chan, const struct env_params *envp) |
| void | env_motion_channel_destroy (struct env_motion_channel *chan) |
| void | env_motion_channel_input_and_consume_pyr (struct env_motion_channel *chan, const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, struct env_pyr *unshiftedCur, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| env_motion_channel only requires luminosity input | |
| void env_motion_channel_destroy | ( | struct env_motion_channel * | chan | ) |
Definition at line 61 of file env_motion_channel.c.
References env_deallocate(), env_pyr_make_empty(), env_motion_channel::num_directions, env_motion_channel::shifted_prev, and env_motion_channel::unshifted_prev.
Referenced by env_motion_channel_input_and_consume_pyr(), and Saliency::~Saliency().
| void env_motion_channel_init | ( | struct env_motion_channel * | chan, |
| const struct env_params * | envp | ||
| ) |
Definition at line 51 of file env_motion_channel.c.
References env_allocate(), env_motion_channel::num_directions, env_params::num_motion_directions, env_motion_channel::shifted_prev, and env_motion_channel::unshifted_prev.
Referenced by env_motion_channel_input_and_consume_pyr(), and Saliency::Saliency().
| void env_motion_channel_input_and_consume_pyr | ( | struct env_motion_channel * | chan, |
| const char * | tagName, | ||
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_dims | inputdims, | ||
| struct env_pyr * | lowpass5, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
env_motion_channel only requires luminosity input
for efficiency, the motion channel takes ownership of the lowpass5 pyramid (rather than needing to make a copy of it), so that after this function the lowpass5 argument will point to an empty pyramid
Definition at line 71 of file env_motion_channel.c.
References env_math::costab, env_params::cs_lev_min, env_pyr::depth, env_image::dims, ENV_ASSERT, env_c_image_div_scalar(), env_c_image_div_scalar_accum(), env_chan_direction(), env_img_initializer, env_img_make_empty(), env_img_resize_dims(), env_max_normalize_inplace(), env_max_pyr_depth(), env_motion_channel_destroy(), env_motion_channel_init(), env_pyr_init(), env_pyr_make_empty(), env_pyr_swap(), env_shift_image(), ENV_TRIG_NBITS, ENV_TRIG_TABSIZ, INTMAXNORMMAX, INTMAXNORMMIN, env_params::maxnorm_type, env_motion_channel::num_directions, env_params::num_motion_directions, env_params::range_thresh, env_motion_channel::shifted_prev, env_math::sintab, and env_motion_channel::unshifted_prev.
 1.9.8
1.9.8
